2024年12月14日,《Computers and Electronics in Agriculture》在线发表了智能科学与工程学院邱权教授团队的科研论文“Robust localization and tracking control of high-clearance robot system servicing high-throughput wheat phenotyping”,并将于2025年2月正式发表。《Computers and Electronics in Agriculture》是中科院农业综合学科大类一区TOP期刊,JCI学科指标分区为Q1(排名1/89),最新影响因子7.7,是目前国际农业工程领域影响力最高的期刊。我院邱权教授为文章的唯一通讯作者,樊正强老师为文章的第二作者。
高通量表型机器人正在革新作物样本的获取方式,助力高效获取高质量的作物表型数据。目前,大型高地隙表型移动机器人凭借高精度、近距离观察等优势,在高通量小麦表型数据获取中发挥着重要作用。然而,针对大型高地隙移动机器人的研究仍较为有限,尤其在自主定位与轨迹跟踪控制方面亟待深入探索。
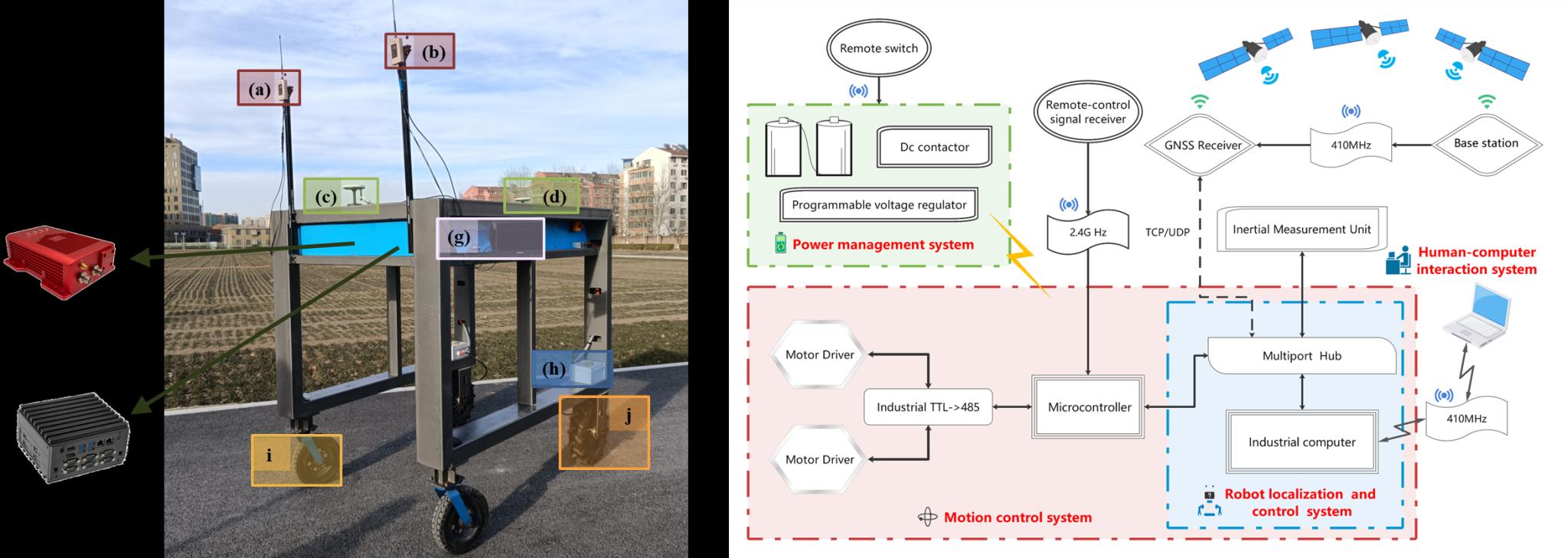
为了克服这一限制,本文搭建了一个大型的高地隙移动机器人系统,用于高通量小麦表型获取。高地隙移动机器人底盘高度达到1.6米,可适应小麦的全生长周期高度。本文的特别之处在于,该系统针对真实环境中的定位和轨迹跟踪进行了优化。针对遮挡环境下GNSS信号差的问题,提出了一种基于自适应卡尔曼滤波的GNSS/INS组合定位算法。此外,提出了一种模糊PID控制策略,使控制器能够自适应的调整PID参数,减少了环境干扰引起的偏差。最后,开发了一套人机交互系统,实现了对机器人远程控制及状态信息的实时监测。现场实验结果表明:①通过400组实验,验证了远程遥控系统的高性能;②左右轮毂电机运行时的平均角速度误差被控制在0.08 rad/s;③提出的自适应卡尔曼滤波算法在存在遮挡的环境下平均位置偏差为0.225 m,平均航向偏差为0.308°;④基于模糊PID的轨迹跟踪控制器的平均横向偏差和航向偏差分别为0.076 m和1.746°。实验结果表明,上述高地隙移动机器人系统可为小麦表型数据的精确观测和高效分析提供有力支持。